The RobotThe chassis of the robot has stayed the same throughout the building process. The chassis is constructed in a U-shape to give us easier access to the brain and to any repairs we need to do, but still remain inside the 18" by 18" constraint. After the construction of the chassis was complete, we started on the construction of a linear motion arm. Late into the build of the arm, we realized it would be too tall to mount on the Robot and also stay within constraints. With this knowledge, we scrapped the old arm and started construction on a shorter version of a linear motion arm which is the one we have on our Robot currently.
|
Team 6865B Robot Model By Carter Strickland |

|
The TeamTeam 6865B consists of Konnor Knox, a programmer and builder, Dacota McGlothlin, our builder and lead computer designer, Blake Weatherly, our builder and driver, Aaron Hinkle, our builder and lead documenter, and Hayden Walker, our lead programmer and driver. Our team always works together very well - even in spite of our small disputes from time to time.
|
The TacticDuring the Autonomous stage, our autonomous program is set to go forward, turn, and go up the two platforms. During the Non-Autonomous stage, our main strategy is to push the flags to our teams color, flip disks, move disks onto the poles, and to go onto one of the two platforms.
|
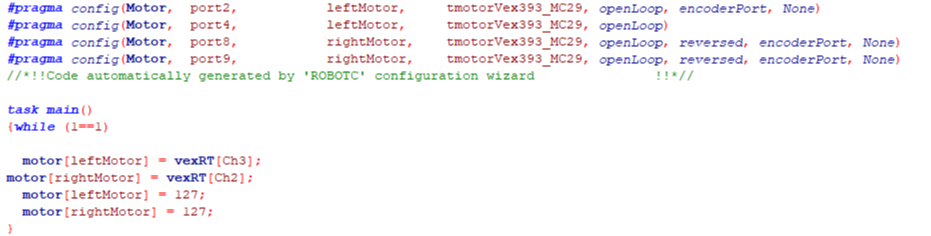
Team 6865B Code
|
