The RobotThis year’s objective is to construct a robot that can be successful in a field with movable caps, changing toggles, and launchable balls. Our team hopes to make the most time efficient design through collaboration. As the year has progressed, we have tried to integrate a claw arm and a launcher. Currently we have revised some of our original designs. Namely, we have forgone a scissor lift for the claw – it is too unwieldy. Rather, we now rely on two upright beams powered by a battery to support the claw. The launcher is still under process. By maximizing the points we can earn per part, we hope to end the season with an ultimately efficient and highly functioning robot.
|
Team 6865C Robot Model By Carter Strickland |

|
The TeamOur team consists of Tyler Philo, one of our team co-leader. He designed our CAD model and came up with the claw design for our robot. He also works on all the coding for the robot and is one of our main drivers. Desiree Royer is our other co-leader. She figured out a way to attach the claw design to the base of the robot. As well as helped Tyler construct the gearing for the claw, and is the other main driver. Adriana Torres is the head journalist. She has helped attach wheels, gears and other parts to the robot. She is also the writer for our Engineering Journal. Kash Widner is our main builder. He gathers parts needed for the robot and attaches the pieces together. He even helps with documenting in our Engineering Journal. Our team is an efficient and hard-working group. We solve all our problems by working together towards our goal.
|
The TacticTo gain points, our team has three options. We can toggle flags, flip colored caps, or mount a platform. The prior two are accessible, at least mostly, via a functioning claw arm. In order to maximize performance, we have prioritized developing a claw arm capable of flipping caps and toggling low flags. Our next objective is to have a functioning ball launch which will give our robot access to the high flags. Unfortunately, we would have to completely reconfigure our robot base to mount the platforms, making that our last priority. By seeking to maximize use of each part, and determining which aspects of a robot allow for the most points, our team has currently decided on an offensive strategy.
|
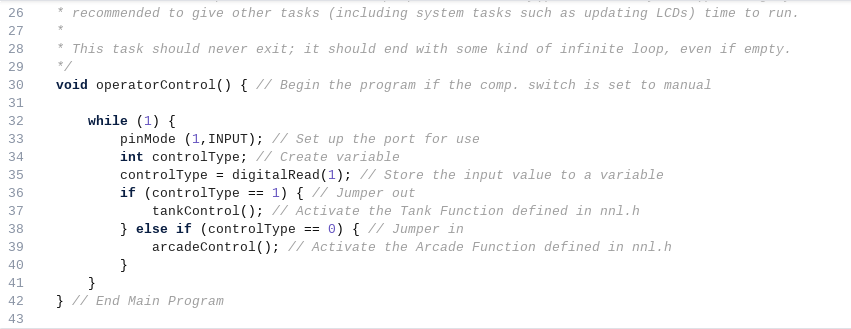
Team 6865C Code
|
