The RobotIn order to come up with our concepts for our robot, our team divided our abilities into equal portions after our main idea was established. We made a base idea of manipulator, chassis, and basic motor functions. As we all built together, the team would split into our positions throughout, programming and fixing small tidbits as need be. All in all, the robot ended with a 6-bar lift, ball punch, and a small frame for least weight possible.
|
Team 6865D Robot Model By Carter Strickland |

|
The TeamOur team consists of James Kelemen, who is our programmer for our autonomous control and our user control, Tyler MacDonald, who is our builder and helper of our manipulator and chassis, John Way, who is our other builder and helper for our manipulator and arm design, and Dawson Wilson, who is our documenter and helper for programming. Our team works together by listening to ideas and using each others talents to the best of their ability.
|
The TacticOur team is going for points based on caps overturned and placed on poles, as well as platform robot standing in endgame. Team D will be going for flag points, but our dominant point system is based otherwise. As our robot is agile, and we are based as an all around average in all areas, we are a support team. Our robot will gain as many points as possible on its own, while helping our other team placed with us towards its robots main goal.
|
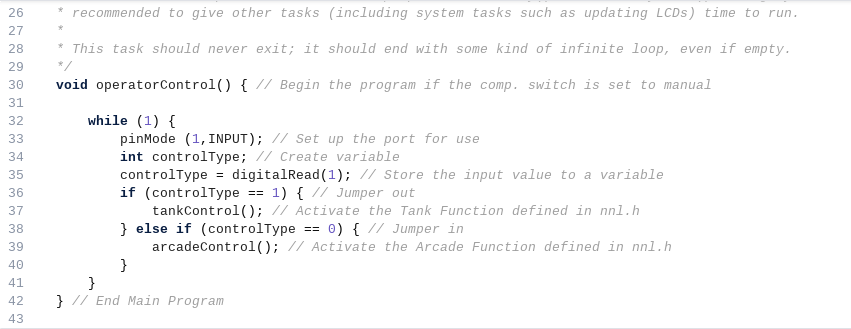
Team 6865D Code
|
